Games101: Computer Graphics-Week 4
Recap and supplement
对于旋转变换,逆时针旋转θ角度和顺时针旋转θ角度的矩阵恰好为正交矩阵,此时矩阵的转置和矩阵的逆相等。
为了统一平移变换和线性变换的书写形式,引入齐次坐标的概念,实质是增加一个维度;
3D Transformations
On homogeneous coordinates, 3D points/vectors can be described as :
- 3D point = $ (x, y, z, 1)^T$
- 3D vector = $ (x, y, z, 0)^T $
- In general, if $ (x, y, z, w)^T $ ($ w \neq 0$ and $w \neq 1$), which refers the same point $(x/w, y/w, z/w, 1)^T $
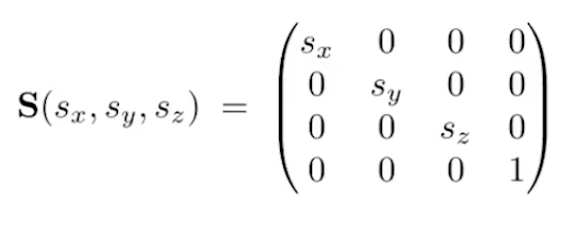
Scale
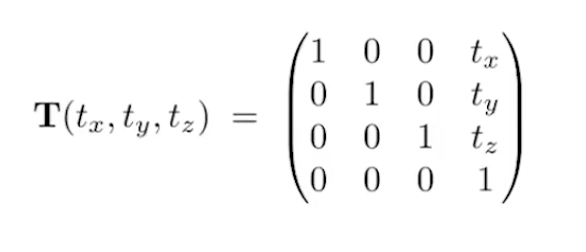
Translation
Rotate
先从绕某一固定轴进行旋转,更普遍的旋转是这三种旋转矩阵的连乘组合
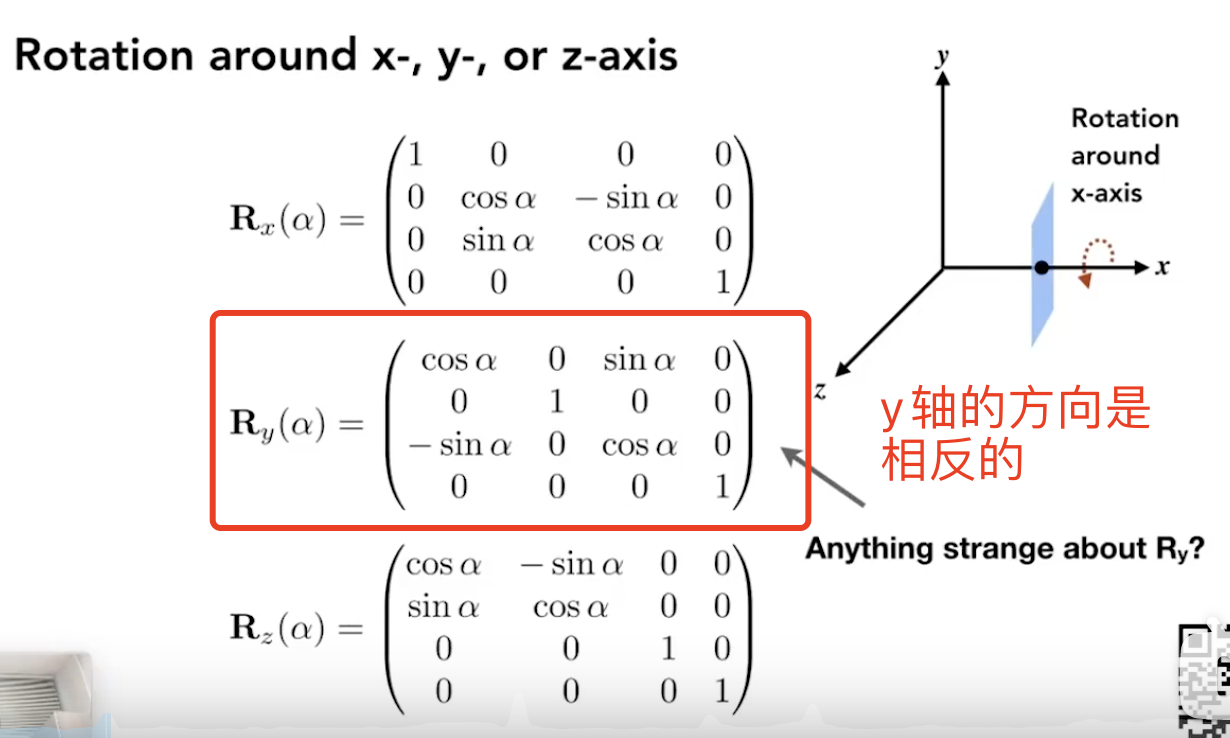
1. 怎么理解绕y轴旋转矩阵是反向的?
从坐标系可以看出:$ \vec{z} \times \vec{x} = \vec{y} $,而这里的坐标向量是按xyz组织的,$\vec{x}$与$\vec{z}$的顺序与坐标系规定恰好相反,所以方向是反的。
2. Rodrigues’ Rotation Formula(罗德里格斯旋转公式)
给定旋转角度α和旋转参考轴 $\vec{n}$ (默认旋转轴的起点是原点),那么有如下公式:

公式核心是将旋转分解到 $ \vec{x}, \vec{y}, \vec{z} $ 三个方向,然后进行旋转。公式$R(n, \alpha)$ 返回的是一个变换矩阵,上面的变换矩阵$ N $ 可以理解为两个向量做叉乘时,第一个向量可以改写为矩阵形式,进行左乘。
3. 在Rodrigues公式下,如何绕任意轴进行旋转?
先平移到原点,再套用公式进行旋转,然后再平移回旋转点。
略去概念:四元数,其引入目标是解决,旋转矩阵不能直接作线性插值。E.g. 一个旋转$\alpha$角度的矩阵A和旋转$\beta$角度的矩阵B,两矩阵相加除以2所得到的的矩阵不等于旋转$ (\alpha + \beta)/2$的矩阵,不是线性插值。
Viewing(观测) transformation
核心将三维图形变换到二维,两要素:三维场景+给定观察点;
类比拍照,给出View的三个步骤:
- (Model transformation) Find a good place and arrange people - 设置好被摄影物体;
- (View transformation) Find a good “angle” to put the camera - 找好相机角度;
- (Projection transformation) Cheese! - 拍照;
上述三步合称为MVP变换,not means Most Valuable Players,下面主要介绍View transformation。
View(视图)/Camera transformation
- How to perform view transformation?

备注:
- 位置向量$ \vec{e} $ ,观测方向 $ \vec{g}$,向上方向$ \vec{t}$(相机本身可以围绕观测方向旋转,因此需要指明方向,固定这个自由度)
- 考虑相对性,只有当物体和相机发生相对位移,摄像机的内容才会发生变化。因此,为了方便起见,这里惯例设定:相机放置在坐标系原点$(0, 0, 0)$,向上方向是沿$\vec{y}$,摄像机方向是$\vec{-z}$。
综上,核心是:将摄影机平移放置到原点,然后再将坐标系的不同轴旋转到标准的 $\vec{x}, \vec{y}, \vec{z}$ 方向:
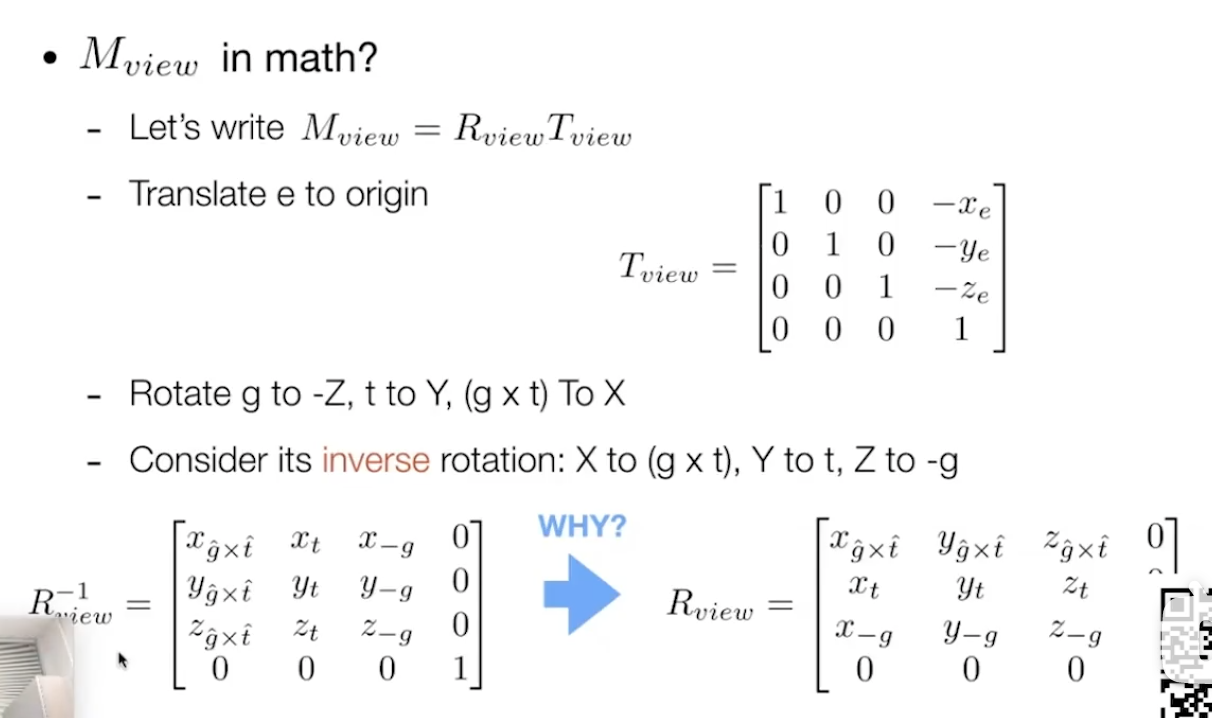
注意:这里的旋转矩阵本身很难求,但可以逆向思考求解,以$\vec{x}=(1,0,0,0)^{T}$为例,将其旋转到$\vec{g}\times\vec{t}$方向,很容易写出$R_{view}^{-1}$的第一列,即$\vec{g}\times\vec{t}$在$\vec{x}, \vec{y}, \vec{z}$ 的分解向量,然后对$R_{view}$就是$R_{view}^{-1}$的转置!(旋转矩阵是正交矩阵的性质!!!)
Projection(投影) transformation
- 3D -> 2D;
- 分为正交投影和透视投影,区别在于投影图是否考虑了透视关系-近大远小;
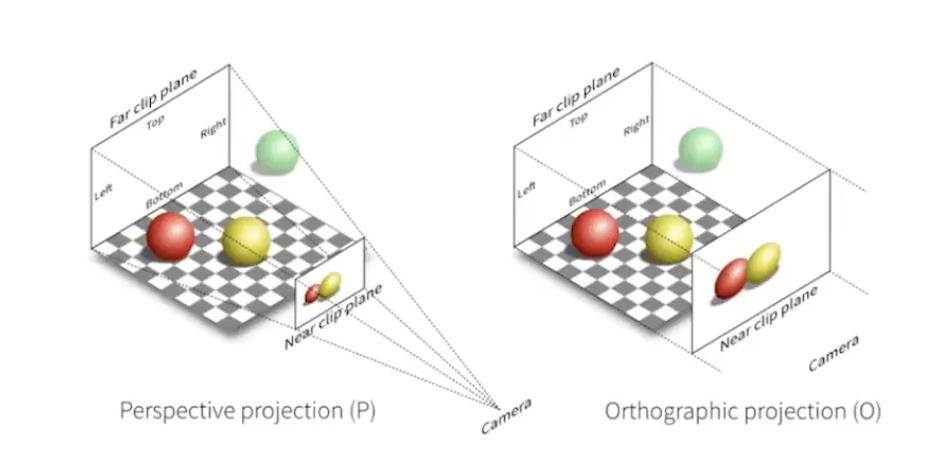
透视投影会汇聚于1个点,而正交投影可以认为相机在无限远处。
Orthographic projection-正交投影
理论步骤:
- 将相机(观测点)摆放到原点,方向设为惯例:看向$-\vec{Z}$,上方向为$\vec{Y}$;
- 物体点的坐标直接丢掉Y轴就可以了(这里要考虑前后重叠的问题);
- 进行translate,再scale将投影放缩到$[-1,1]^2$(这里的上标2表示x和轴均为此范围)
实际步骤:
translate + scale
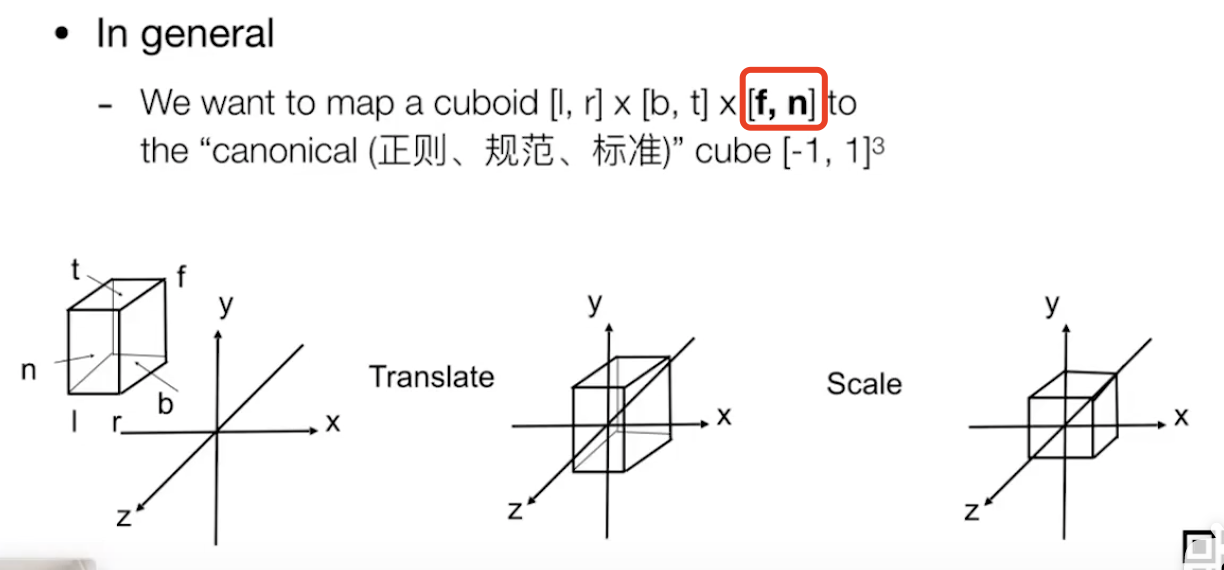
为什么是[f,n]而不是[n,f]?
注意相机观测是 $-y$方向,远点f的值小于近点n的值。
给出变换矩阵$M_{ortho}$:
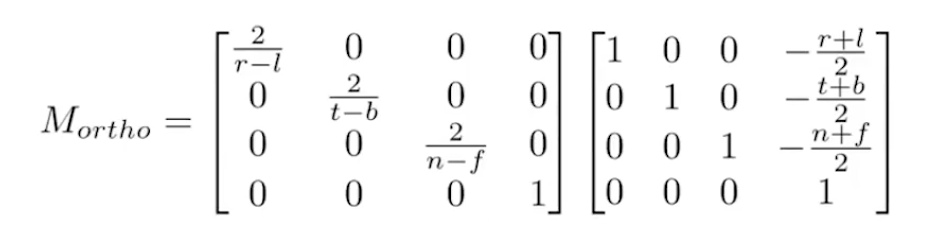
从矩阵可以看出,先平移到立方体中心,然后再缩放。
Perspective projection-透视投影
透视投影可以等效为两步:
- 先将远点f在本平面内挤压,$M_{persp->ortho}$
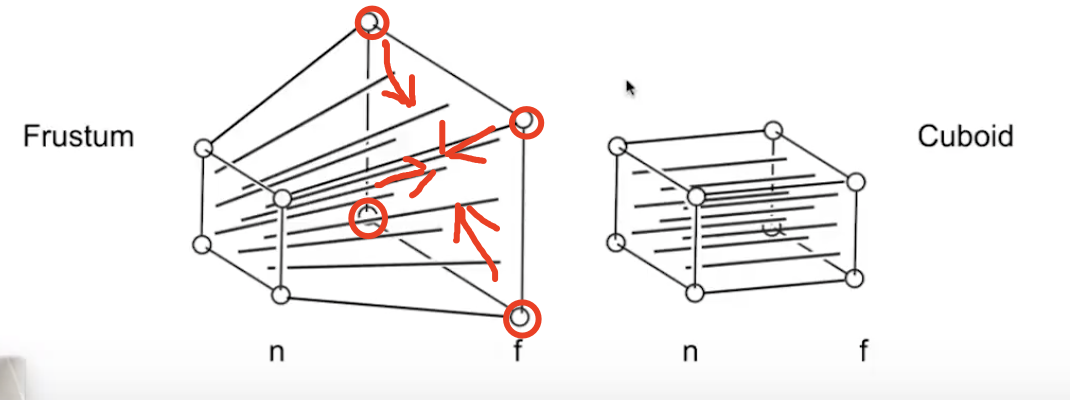
如图所示,将一个frustum(截头锥体)转换为Cuboid(立方体)
- 再进行正交投影,$M_{ortho}$
因此,可以有两个结论:
- 近平面n上的点应不受$M_{persp->ortho}$操作影响,远平面f上的点只在本平面内压缩,即点坐标$z$值布标;
- 注意,这里并没有限制n和f之间的点在挤压操作后,z坐标不变!
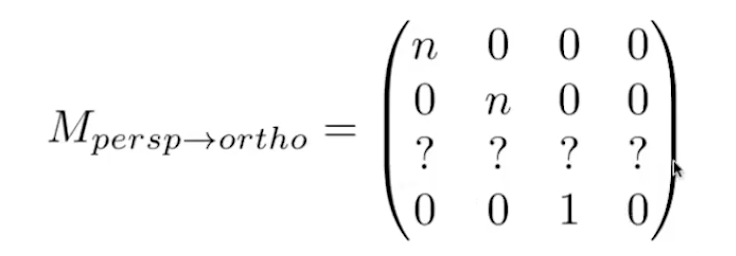
所以,核心问题转为如何求$M_{persp->ortho}$?
- 由透视关系,相似性原理可知:
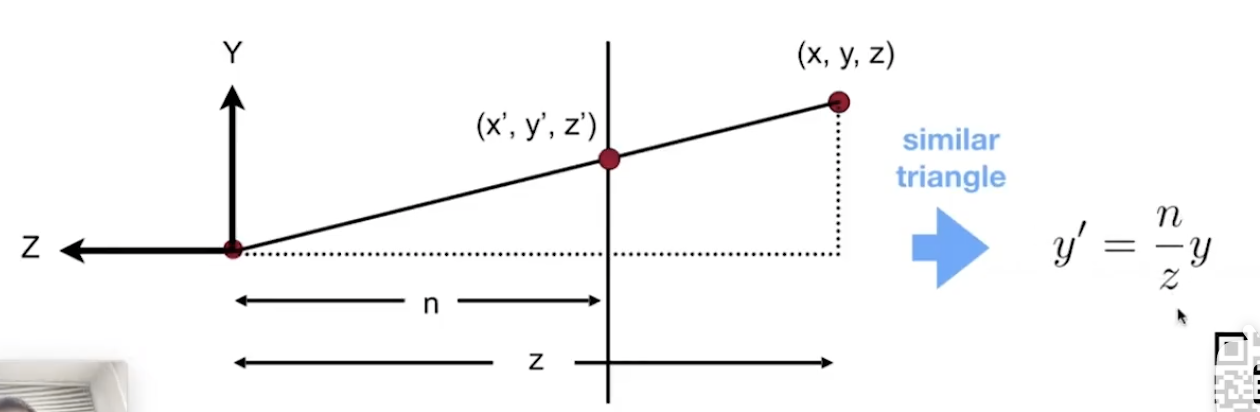
所以,对于任意点坐标(不局限n和f平面):$(x,y,z,1)$有:
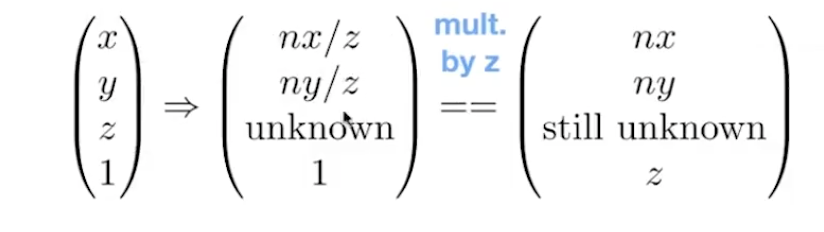
可知(待求z坐标的变换行向量):
- 引入n平面和f平面的预设关系(n平面上任意一点变换前后应不发生变化, f平面上的中心点变换前后应不发生变化),列出方程组:
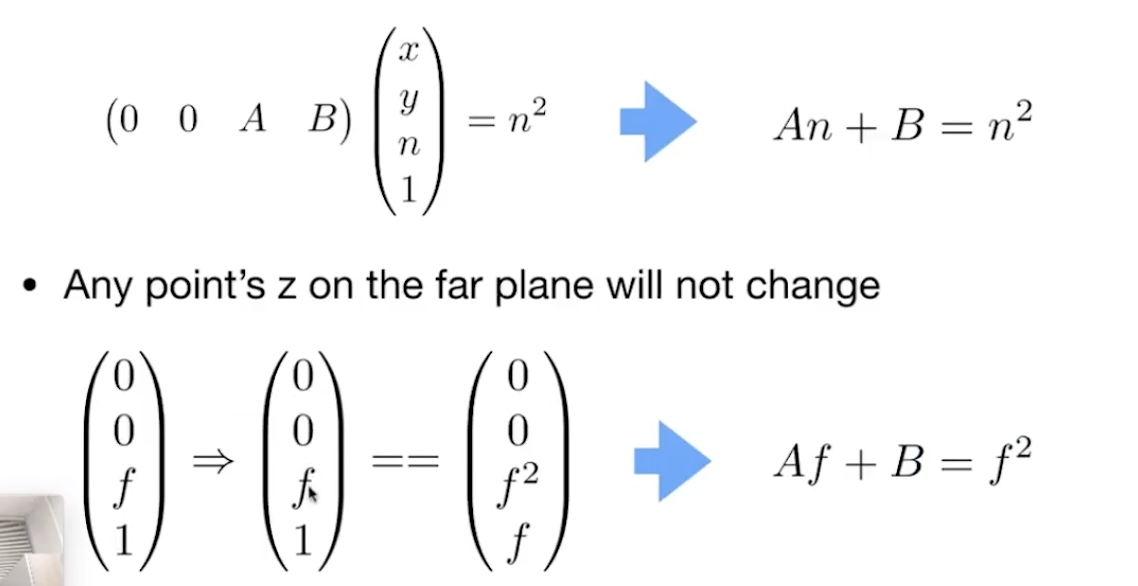
可以解得A和B,得到最后的透视投影的转换矩阵$M_{persp->ortho}$
Games101: Computer Graphics-Week 4
http://k-zha14.github.io/2020/12/10/Games101-Computer-Graphics-Week-4/

