Games101: Computer Graphics-Week 3
1. Transformation-变换
Modelling-模型变换
- 游戏中场景的变化;
- 机器人跳舞(姿态变化);
- 物体相互作用发生形变和缩放;
- 光栅化成像,从3D到2D的projection(投影)
Viewing-视角变换
同一个对象,主摄影视角进行变换产生不同的光栅化视角;
2. 2D Transformation
作为3维变换的基础,从2D变换讲起,核心是:将变换操作与矩阵操作联系起来!
Attention:
这些变换均可以由一个变换矩阵表征,所以统称为线性变换(Linear Transforms);
下面的x, y为图上任意一点的坐标;
下面的变换默认是对基向量(单位长度)进行变换的;
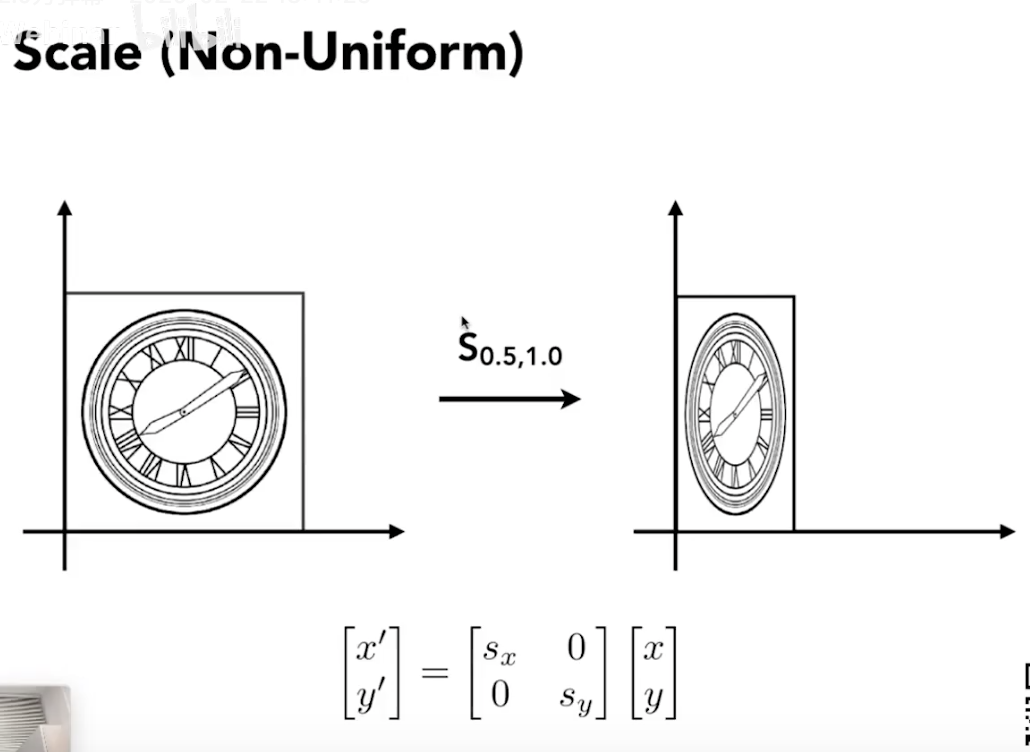
2.1 Scale
- 等比缩放

- 非等比缩放
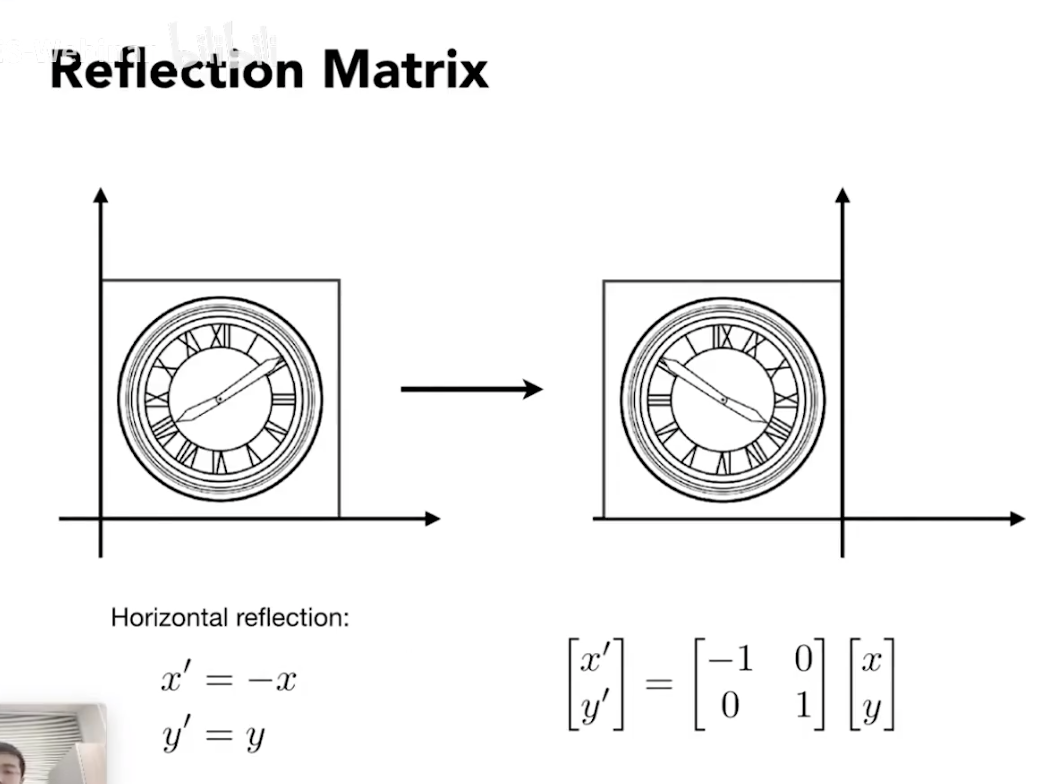
2.2 Reflection-翻转
以相对y轴进行镜像翻转为例,给出Reflection Matrix
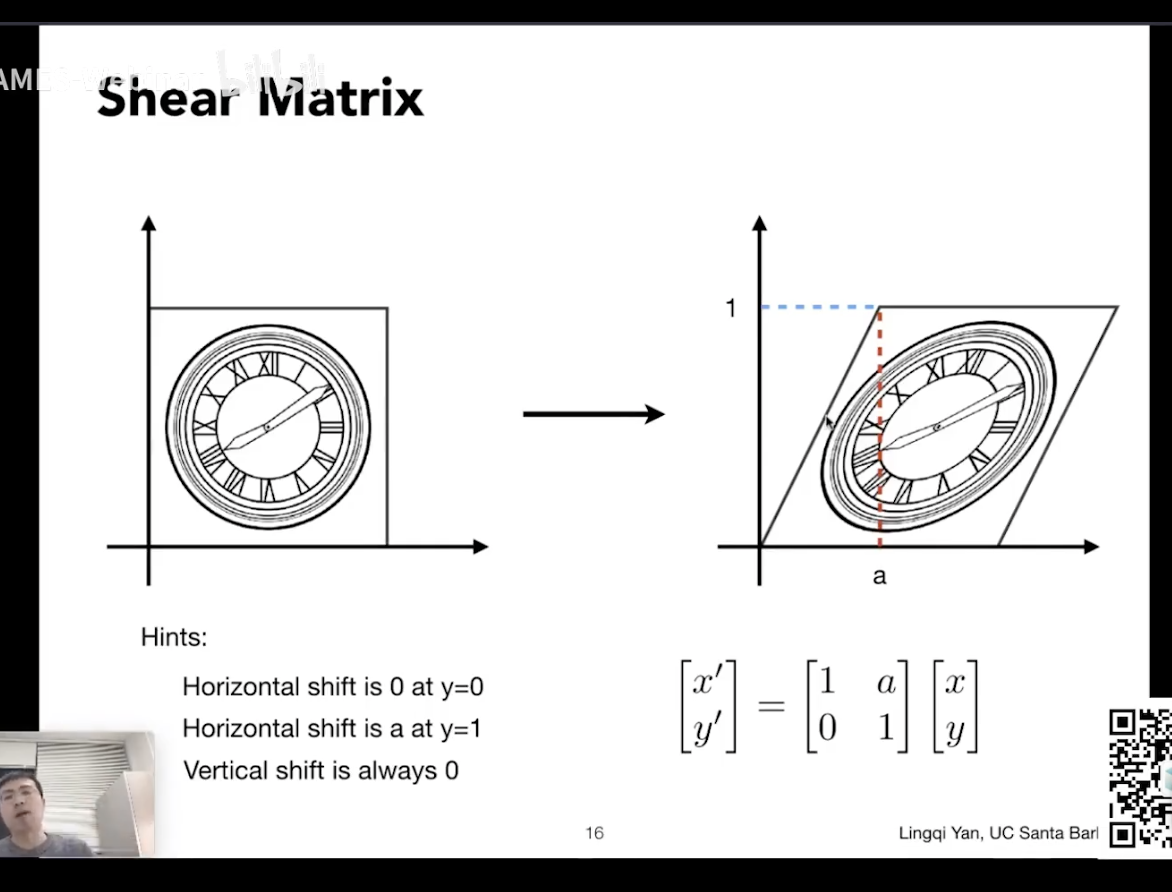
2.3 Shear-切变
物体具有一定的弹性,可以沿某个方向发生一定的形变。
2.4 Rotate-旋转
2D 旋转,默认逆时针以原点作为中心进行旋转
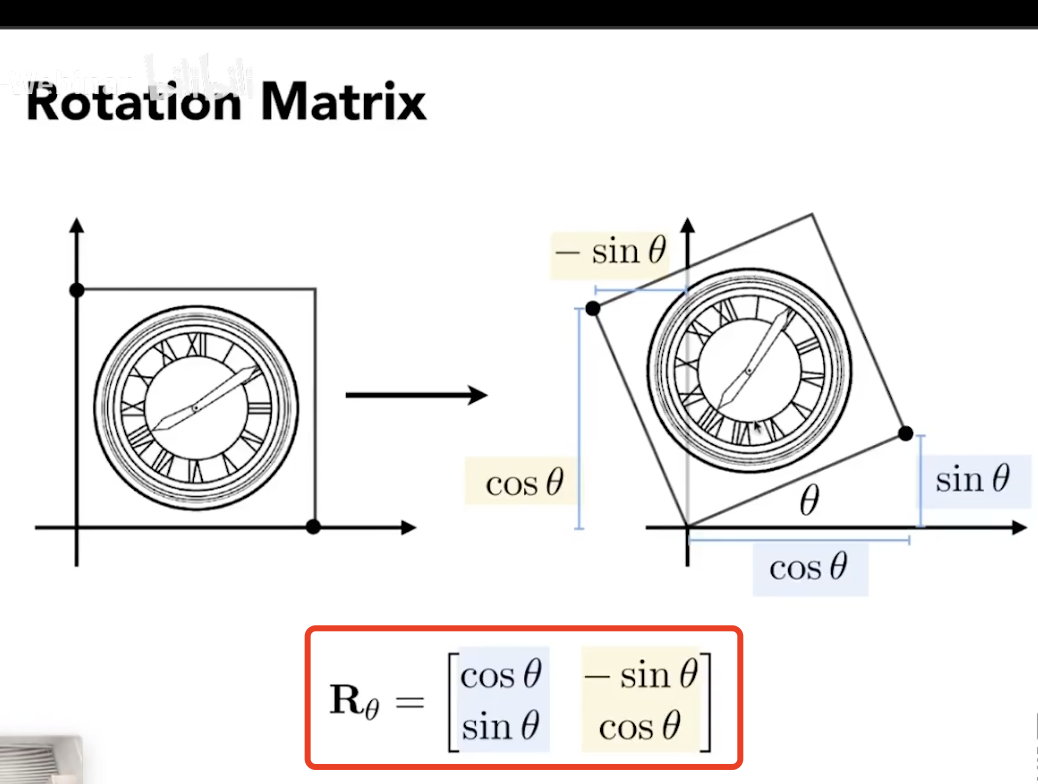
旋转矩阵的推导和证明:
- 法1:可以在旋转坐标系中,任选两个点求解映射变换表达式;
- 法2: 可以取两个特殊点(1,0)和(0,1)以逆时针旋转θ角度,根据旋转前后的坐标,列出4个方程,求解旋转矩阵的未知数;
2.5 Inverse Transform
逆变换矩阵就是原变换矩阵的逆矩阵。
Homogeneous Coordinates(齐次坐标)
上述的都是线性变换,可以表示为变换矩阵相乘的形式;
Why引入齐次坐标?
当发生平移变换(Translation,就是翻译这个单词)时,无法再使用上面的变换矩阵相乘的形式进行表征,只能写作**仿射映射(Affline Map)**形式:
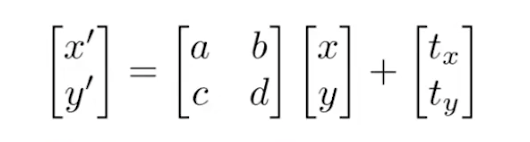
仿射变换 = 线性变换 + 平移(即便在齐次坐标中也是如此,先线性再平移)
由于这种形式不满足上面的方程形式,所不是线性变换。
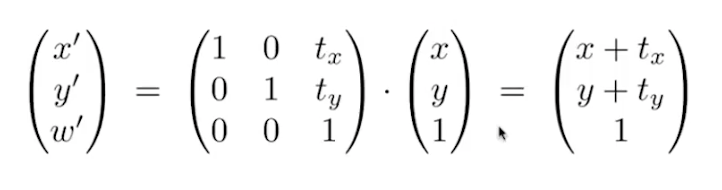
为了能用上面的矩阵乘法形式统一表征变换操作,引入齐次坐标系的概念。
齐次坐标的定义
点和向量的表示
- 2D Point: $(x, y, 1)^T$
2D Vector: $ (x, y, 0)^T$
平移变换表示
- 为什么点的增加列为1,而向量的增加列为0?
- 首先,向量具有平移不变性,也就是说平移操作不应该影响向量;
- 其次,更深层次,这个符合物理定义:
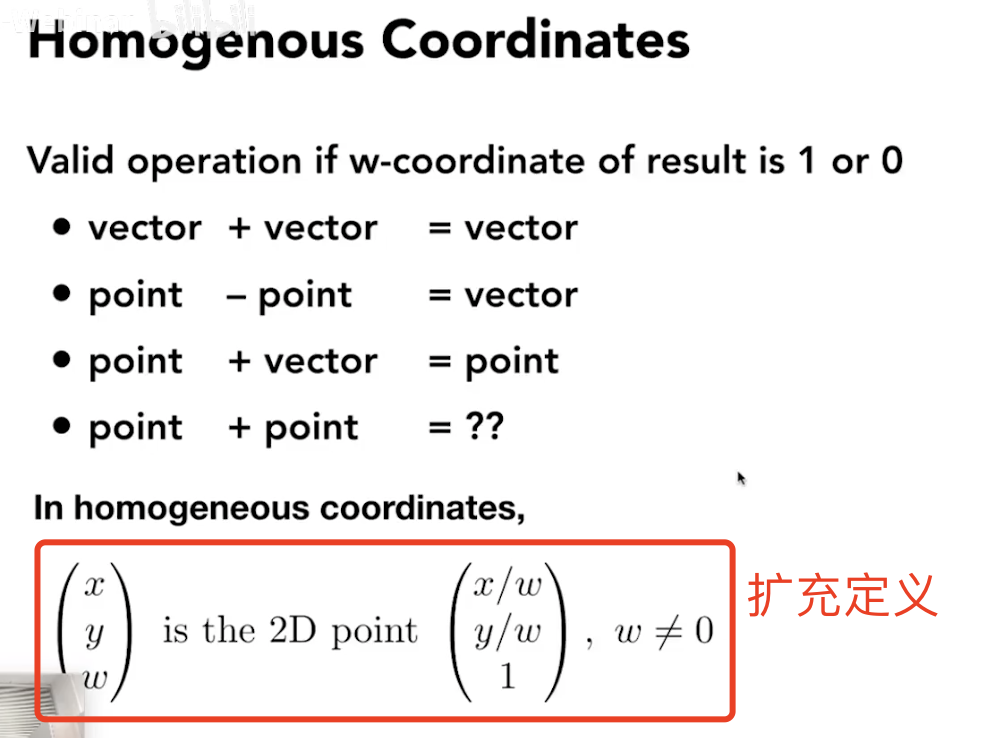
在扩充定义的补充下,对于$ w \neq 1$的点,都进行归一化操作,此时point+point实际结果就是中点。
综上,可以用齐次坐标下的线性变换形式表示二维情况下的仿射变换时,齐次坐标的最后一行一定为$ (0, 0, 1) $。(注意限定条件,其他情况下,最后一行有意义)
Games101: Computer Graphics-Week 3
http://k-zha14.github.io/2020/12/09/Games101-Computer-Graphics-Week-3/

